L'ÉTS vous donne rendez-vous à sa journée portes ouvertes qui aura lieu sur son campus à l'automne et à l'hiver : Samedi 18 novembre 2023 Samedi 17 février 2024 Le dépôt de votre demande d'admission à un programme de baccalauréat ou au cheminement universitaire en technologie sera gratuit si vous étudiez ou détenez un diplôme collégial d'un établissement québécois.
En codirection avec : Michaud, François Conception d'algorithmes d'apprentissage par renforcement avec modèle pour robot multisensoriel, par Dupoiron,Guillaume Automne 2024
En codirection avec : Development of Machine Learning algorithms using synthetic visuotactile data for robotic manipulation, par De La Cruz Sanchez,Berith Automne 2024
En codirection avec : Joncas, Simon Conception d'une cellule robotisée avec génération de programmes automatisés, par Sauvain,Camille Hiver 2023
En codirection avec : Lebel, François Développement d'une cellule automatisée de préparation d'ensembles prêts-à-monter multimatériaux pour la fabrication de composites en aérospatiale, par Limes,Diane Automne 2023
En codirection avec : Lebel, François Conception axée sur la manufacturabilité d’un préhenseur robotique robuste : Un cas d’application pour la mise en place automatisée de plis multi-matières en support à la fabrication de pièces composites complexes, par Tétrault-Leclerc,Samuel Hiver 2024
En codirection avec : Design of a Collaborative Gripper for Foam Stickers Handling, par Bilodeau,Francis Automne 2023
En codirection avec : Tri collaboratif de pièces semi-translucides et réflectives par intelligence artificielle, par Blanchet,Samuel Hiver 2024
En codirection avec : Mutual Capacitance Tactile Sensor Design and Sim-to-Real Bridging for Robotic Grasping, par Al Mrad,Abed Al Rahman Automne 2023
En codirection avec : Téléopération d'un manipulateur robotisé mobile par réalité virtuelle pour la maintenance et l'apprentissage de tâches, par Boutin,Jonathan Été 2024
En codirection avec : Joncas, Simon Configuration automatisée de robots agiles pour la production de pièces en matériaux thermoplastiques, par Chokre,Ali Été 2024
En codirection avec : Doutres, Olivier Développemet d'un conduit auditif artificiel permettant de mesurer la pression mécanique induite par un bouchon d'oreille, par Heni,Rihab Été 2024
En codirection avec : Nadeau, Nicholas Enhancing Robot Localization with Semantic Features: Creation of a Semantic Map for Autonomous Navigation Tasks, par Le,Huynh-Anh Hiver 2023
En codirection avec : Pedersoli, Marco "Few-Shot Object Detection" et application "Pick and Place" dans le cadre d'un projet avec l'entreprise Teledyne Dalsa, par Bailly,Antoine Été 2023
En codirection avec : Création d'une carte sémantique par caméra stéréoscopique qui sera utilisée pour faire de la navigation autonome, par Le,Huynh-Anh Hiver 2023
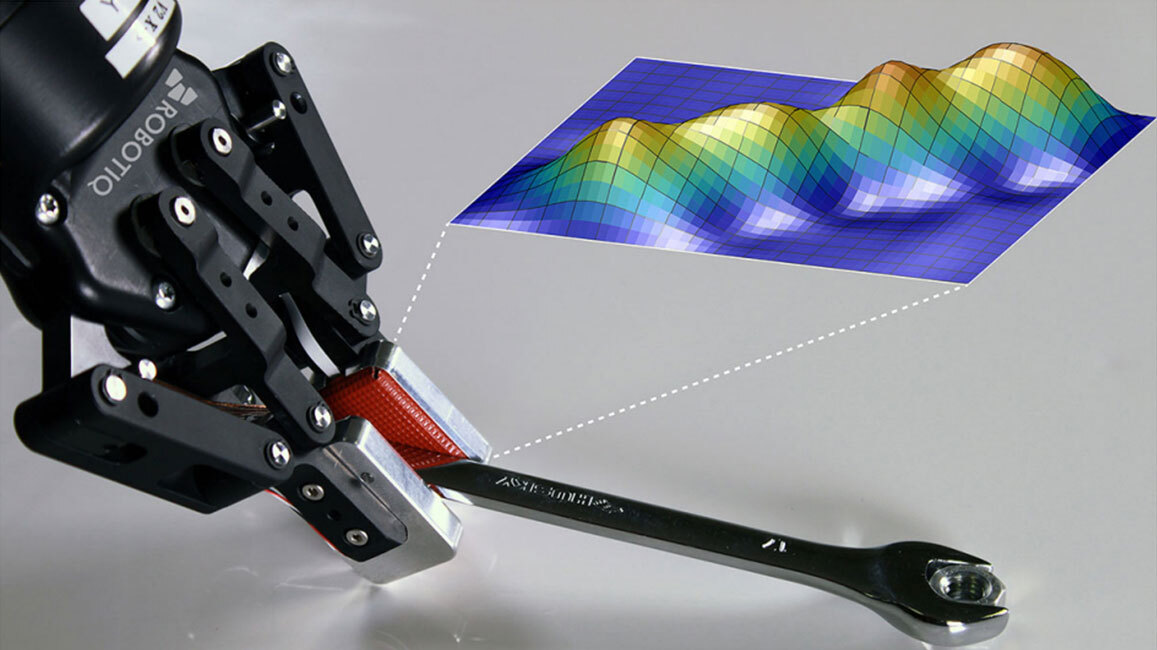
Jean-Philippe Roberge, Louis L'Écuyer-Lapierre, Jennifer Kwiatkowski, Philippe Nadeau, Vincent Duchaine. 2021 « Tactile-based object recognition using a grasp-centric exploration ». Communication lors de la conférence : IEEE 17th International Conference on Automation Science and Engineering (CASE) (Lyon, France, Aug. 23-27, 2021)