
Banc d’essai évaluant la stratégie du pas lors de tâches industrielles
Virtual Ergonomics. [Publication Facebook].
Le positionnement des pieds a une influence importante sur le maintien de la stabilité. Dans le milieu industriel, l’utilisation du pas pour rester stable est habituelle, puisque les travailleurs sont souvent amenés à atteindre des objets éloignés et à appliquer des efforts sur ces cibles pour accomplir leurs tâches. Des modèles humains numériques (DHM), intégrant les contraintes biomécaniques du corps humain, ont été développés pour permettre l’évaluation ergonomique de manière virtuelle et l’observation des interactions entre le mannequin et son environnement. Cependant, le développement de modèles complets utilisant la stratégie du pas nécessite la connaissance du comportement humain dans des conditions similaires lors d’essais expérimentaux. L’objectif de ce projet de recherche est de développer d’une part un banc d’essai expérimental permettant la simulation de conditions industrielles nécessitant l’application d’efforts au niveau des mains, et d’autre part d’observer le comportement humain du positionnement des pieds. Les résultats préliminaires indiquent que ce positionnement varie en fonction des exigences de la tâche, qu’un obstacle soit présent ou non, afin d’élargir la base de soutien (c.-à-d., base des pieds) dans la direction permettant de maximiser la stabilité posturale. Mots-clés. Posture, Stabilité, Faire un pas, Zero Moment Point, Modèle humain numérique
Introduction
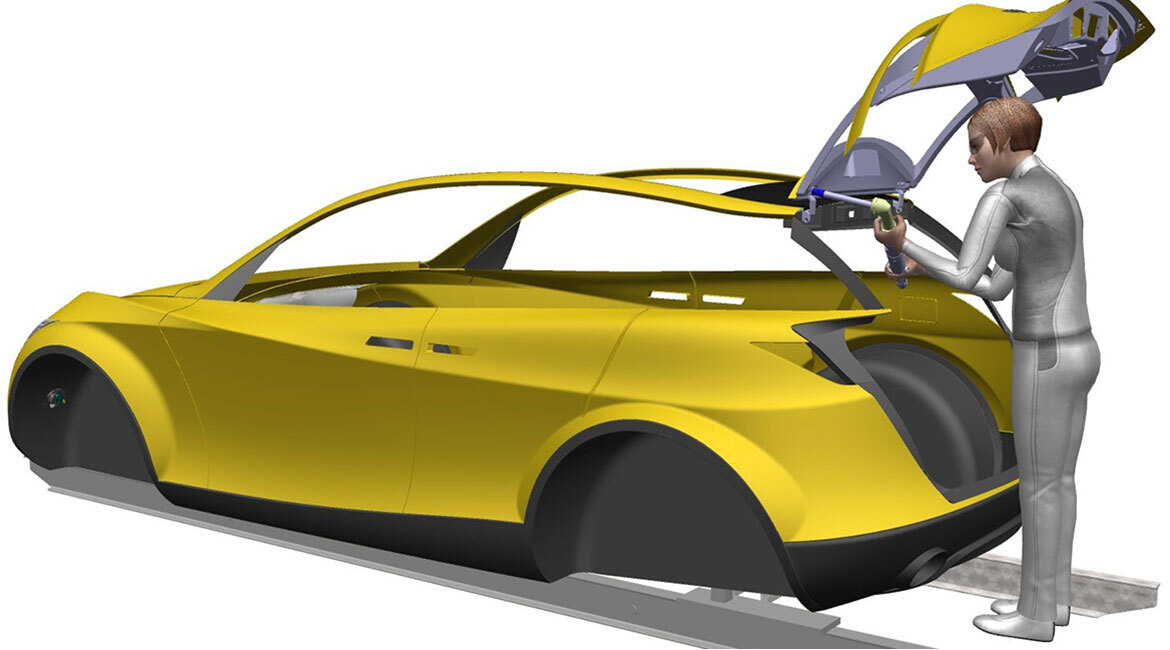
Un défi souvent rencontré dans les modèles humains numériques (DHM) actuels (Figure 1) est la prédiction du positionnement des pieds lors d’exécution de tâches comportant des contraintes spatiales ou des conditions particulières (p. ex., utiliser un outil, atteindre une cible éloignée, appliquer des efforts).
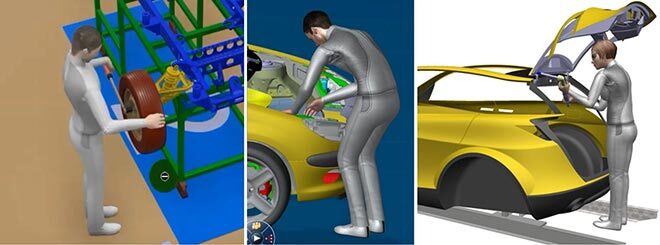
Figure 1 Simulations au moyen de modèles humains numériques (DHM)
Les études antérieures qui ont proposé des modèles de prédiction du positionnement des pieds ont analysé uniquement des tâches de poussée et de tirée, ce qui n’est pas représentatif du milieu industriel (Baril-Gingras et Lortie, 1995) (Figure 2). De plus, aucun modèle n’a évalué des tâches impliquant l’utilisation d’outils manuels ou tenant compte de l’effet d’un obstacle latéral. Ce dernier impose en effet une contrainte spatiale et oblige l’exécution de tâches décentrées.

Figure 2 Utilisation de la stratégie du pas lors de tâches industrielles courantes
Ce projet de recherche a été réalisé pour le modèle de prédiction du positionnement des pieds développé par Zeighami et al. (2019). Ce modèle a été intégré dans la technologie Smart Posture Engine (SPE), conçue par l’équipe de recherche du professeur Rachid Aissaoui au laboratoire LIO-CRCHUM en collaboration avec l’entreprise 3DS (Dassault Systèmes) Canada. La stratégie de prédiction des pieds du modèle SPE se démarque par le contrôle précis d’un paramètre nommé ZMP (Zero Moment Point) à l’intérieur de la base de soutien. Elle permet de simuler le mannequin virtuel dans la posture la plus stable possible en fonction de la portée, de la hauteur et des efforts requis au niveau des mains. Cependant, aucune étude expérimentale n’avait encore été réalisée pour valider ce modèle de prédiction des pieds.
L’objectif principal de cette étude est de concevoir un banc d’essai expérimental qui permet d’évaluer le paramètre ZMP, simultanément avec le positionnement des pieds. L’hypothèse formulée est la suivante : lors de tâches centrées ou de tâches décentrées comportant un obstacle latéral, les pieds se déplacent pour étendre la base de soutien dans la direction du déplacement du ZMP afin de maximiser la stabilité posturale du mannequin.
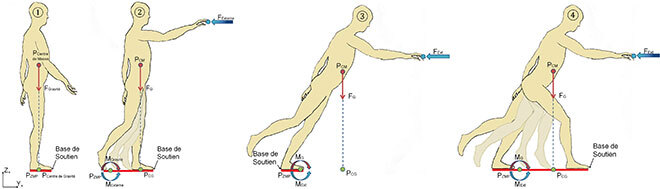
Figure 3 Représentation du ZMP avec et sans force externe dans quatre situations
Le ZMP est un point virtuel au niveau du sol où la somme des moments générés par la force gravitationnelle et les forces externes appliquées au mannequin est nulle (Vukobratović et Borovac, 2004). La position de ce point relativement à la base de soutien permet de déterminer lorsqu’un mannequin est considéré instable et nécessite l’utilisation d’un pas pour récupérer sa stabilité (Figure 3).
Un banc expérimental à usage multiple
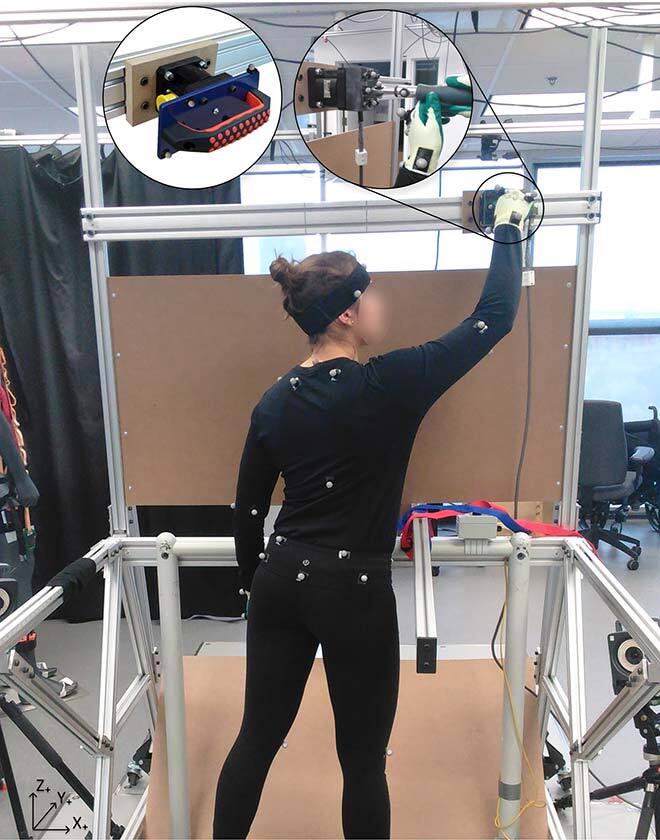
Figure 4 Banc expérimental en position cible décentrée avec un obstacle latéral. En vue de détail l’interface poignée et l’interface tournevis.
Dans le cadre de ce projet de recherche, un banc expérimental a été conçu et fabriqué afin de mesurer simultanément les efforts à la main et la cinématique du corps.
Le banc d’essai évalue les conditions de poussée et de tirée par l’entremise d’une première interface constituée d’une poignée en caoutchouc à haute friction, dont la forme améliore la préhension de la main. Une deuxième interface, fabriquée par impression 3D, évalue l’utilisation d’un tournevis. Ces deux interfaces sont fixées sur un capteur afin d’acquérir les efforts appliqués par le sujet (Figure 4).
La structure du banc est constituée de deux rails coulissants fixés sur des membrures articulées permettant le positionnement de la cible dans les trois axes (X, Y, et Z) et l’emplacement d’un obstacle latéral ou frontal.
Les essais expérimentaux
Les expérimentations ont été menées au Laboratoire de recherche en imagerie et orthopédie (LIO) du Centre de recherche du CHUM. Le protocole défini pour cette recherche a permis l’étude de deux positions de cible à une hauteur de 10 cm au-dessus de la tête du sujet, en tenant compte des mesures anthropométriques de celui-ci. À cette hauteur les sujets sont moins portés à utiliser d’autres stratégies que celle du pas pour rester stables, puisqu’elles défavorisent l’atteinte de la cible. Bien que les tâches au-dessus de la tête ne sont pas des postures privilégiées, elles restent présentes dans certains milieux industriels (Marchand et Giguère, 2010) et leur étude est importante, car elles représentent toujours un risque ergonomique significatif (van der Molen et al., 2017).
Les deux positions de cible étudiées sont la position centrée sans obstacle et la position décentrée avec un obstacle latéral. Pour chacune des positions, quatre conditions de main ont été évaluées : pousser, tirer, utiliser un tournevis, et enfin atteindre une cible sans appliquer d’effort. Un total de 40 essais ont été traités et analysés.
Enfin, en intégrant les données cinématiques acquises par 12 caméras optoélectroniques de capture du mouvement (VICON, Nexus 2.8) aux données cinétiques (c.-à-d., les forces et les moments de réactions au sol et aux mains), nous avons pu calculer le paramètre ZMP afin d’analyser son comportement dans les différentes configurations.
Différences observées selon la position de la cible
Les résultats des expérimentations exploratoires indiquent que le positionnement des pieds varie en fonction des exigences de la tâche et des contraintes spatiales lorsqu’un obstacle est présent ou non. Des comportements différents ont été observés chez le sujet (Figure 5).
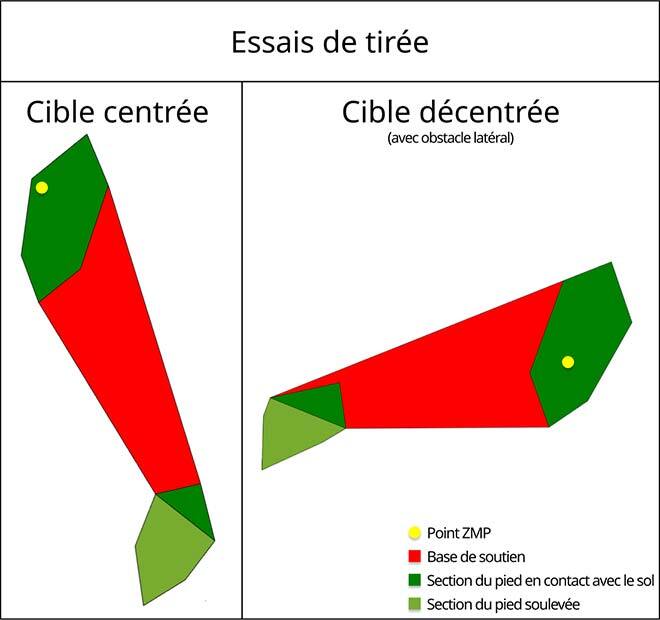
Figure 5 Comparaison du positionnement des pieds lors des essais de tirée avec la cible centrée et la cible décentrée.
Durant les essais avec la cible centrée, un positionnement du corps aligné avec la direction de la force appliquée par la main a été constaté, ce qui peut être expliqué par la liberté spatiale du sujet de se positionner comme il le souhaitait. Pour ces essais, la stabilité était maintenue en élargissant la base des pieds dans la même direction que la force appliquée. Ces observations étaient différentes pour les essais avec un obstacle. En effet, dans ce dernier cas, la contrainte spatiale empêchait le sujet de se positionner en ligne avec la force appliquée et donc, il en résulte qu’un pas majoritairement latéral a été observé. Ce comportement était utilisé possiblement afin de produire une base des pieds suffisamment stable pour résister au moment créé par la force de réaction à la main et sa distance décentrée par rapport au sujet. Ces deux observations appuient le déplacement des pieds pour étendre la base de soutien dans la direction du déplacement du ZMP afin de maximiser la stabilité.
Il est à noter que l’étude est exploratoire du fait de l’observation d’un seul sujet, et demeure limitée quant à la généralisation des résultats et des conclusions émises. Dans les travaux futurs, il est prévu de réaliser un protocole expérimental composé de dix tâches faisant varier la hauteur, la portée et la position de l’obstacle. Ce nouveau protocole sera appliqué à un échantillon supérieur à 20 sujets d’âges et d’anthropométrie différents.
Les données recueillies lors de ce projet de recherche ont contribué au développement du modèle de prédiction du positionnement des pieds de Zeighami et al. (2019), afin d’optimiser le SPE.
L’implémentation future de ce nouveau modèle de prédiction des pieds dans le DHM de Dassault Systèmes constituera une avancée considérable, puisqu’il éliminera les manipulations auparavant nécessaires pour positionner le mannequin et assurera une prédiction précise des pieds.
Partenariats
Ce projet de recherche a été réalisé en collaboration avec 3DS (Dassault Systèmes) Canada et le LIO-CRCHUM, dans le cadre du projet Smart Posture Engine. Ce projet de recherche a reçu le soutien du Conseil de recherches en sciences naturelles et en génie du Canada (CRSNG) et de PROMPT Québec.
Information supplémentaire
Pour plus d’informations sur cette recherche, veuillez consulter l’article suivant :
Latour, F., Zeighami, A., Hagemeister, N., Charland, J. & Aissaoui, R. (2020). Experimental evaluation of postural stability using stepping strategies during industrial tasks. In L. Hason, D. Högberg & E. Brolin (Eds.), Proceedings of the 6th International Digital Human Modeling Symposium (DHM2020), Skövde, Sweden, August 31-September 2, 2020, (Vol. 11, pp. 156-165). Amsterdam, Netherlands: IOS Press.


