
Améliorer les performances des drones en utilisant des simulateurs de vol

L’image d’en-tête est utilisée avec la permission de Hydra Technologies et est protégée par droit d’auteur.
L’intérêt porté au drone est de plus en plus grandissant étant donné leurs nombreux domaines d’application. Dans le but de valider les techniques d’amélioration de performances d’un drone, un simulateur de vol a été développé. Son architecture générale a été divisée en sous-modèles : aérodynamique, propulsion, actionnement et structure. L’estimation de chacun de ses sous modèles a été réalisée à partir de méthodes numériques et expérimentales. Cette méthodologie a été appliquée aux systèmes autonomes de vol UAS-S4 et UAS-S45 de Hydra Technologies. Les résultats obtenus montrent que la méthodologie présentée permet d’obtenir un simulateur de haute précision.
Introduction
De la production cinématographique au transport du matériel d’urgence, en passant par la cartographie et la surveillance, les systèmes de vol autonome ou drones trouvent leur utilité dans de nombreux domaines. L’essor des systèmes de vol autonome est fortement lié à leurs capacités à effectuer des missions en zones dangereuses. Par ailleurs, l’absence de pilotes les dispense de certaines limites comme la durée de vol (82,5 h de vol pour le drone solaire Zephir de QinetiQ contre 11 h de vol pour un pilote [1]) ou encore l’altitude maximale.
Le marché mondial des drones devrait dépasser les 16 milliards de dollars en 2025 [2]. Les drones constituent donc un secteur de l’industrie aéronautique dont la croissance est très dynamique. L’amélioration de leurs performances devient ainsi un enjeu capital. Cependant, la validation d’une technique d’amélioration de la performance, par exemple d’un nouvel algorithme pour l’atterrissage, peut être très exigeante en argent et en temps. De plus, la validation expérimentale en vol peut conduire à la destruction de l’appareil. L’utilisation d’un simulateur de vol de haute précision est une solution intéressante et importante, sans risques de perte de drone en vol.
Figure 1 Évolution des revenus du marché des drones
Figure 2 Simulateur de vol de recherche pour l’avion d’affaire Cessna Citation X
Un simulateur de vol est un dispositif numérique permettant d’obtenir le comportement d’un aéronef à partir de données d’entrée (vitesse, altitude, position des gouvernes, etc.). Le cœur d’un simulateur de vol est le modèle de vol, représenté par les équations de la dynamique de l’aéronef. Plusieurs méthodes sont utilisées pour concevoir un modèle de vol [3]. Dans [3], des tests de vol effectués sur le simulateur de vol de recherche pour l’avion d’affaire Cessna Citation X ont été utilisés pour la validation de son modèle. La méthode présentée dans cet article est basée sur la division de l’architecture générale de l’aéronef en plusieurs sous-modèles, qui constitueront le modèle de vol global.
Figure 3 Architecture générale des drones UAS-S45 et UAS-S4
Pour la réalisation de ce projet, l’intérêt s’est porté sur les drones UAS-S4 et UAS-S45, conçus et fabriqués par Hydra Technologies [4]. Les modèles de ceux-ci ont été divisés en sous-modèles d’aérodynamique, de propulsion, d’actionnement et de structure. La méthodologie de conception du modèle de vol repose sur l’estimation précise de chacun de ces sous-modèles.

Figure 4 L’UAS-S4. Tiré de [4]
Méthodologie d’estimation des sous-modèles
Aérodynamique
L’estimation du sous-modèle aérodynamique revient à prédire de manière précise les charges, forces et moments qui agissent sur le drone durant un vol [4]. Pour y parvenir, l’équipe du Laboratoire de recherche en commande active, avionique et aéroservoélasticité (LARCASE) a mis sur pied un code appelé Fdérivatives [5-7]. Le code Fdérivatives repose sur une collection d’équations et d’abaques et permet d’obtenir de manière précise les forces aérodynamiques d’un aéronef à partir de ses données géométriques. C’est une amélioration de la procédure DATCOM (DATa COMpendium) [8-11], qui est l’un des meilleurs recueils des méthodes de calcul aérodynamique pour aéronefs basée sur des données expérimentales.
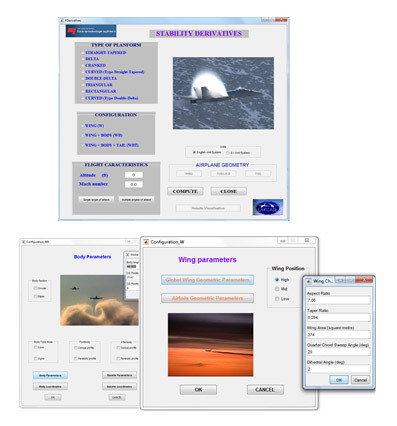
Figure 5 Fenêtre principale du code Fderivatives
Propulsion
Le sous-modèle de propulsion a été obtenu en réalisant un modèle de moteur à deux temps et une analyse numérique des hélices des drones. Un moteur à deux temps produit de la puissance par un procédé thermodynamique de combustion appelé cycle d’Otto [12]. Ce cycle est décrit par des équations permettant d’obtenir la puissance et le couple du moteur. Une analyse numérique a ensuite été effectuée sur l’hélice afin de déterminer la poussée générée en fonction de la puissance du moteur.
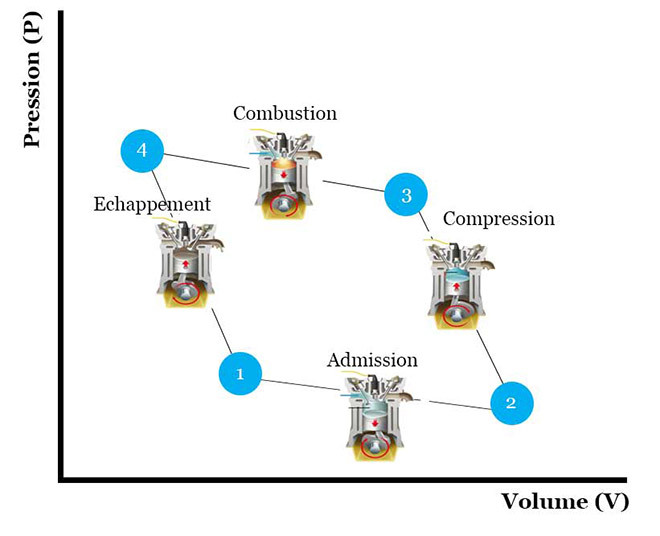
Figure 6 Le cycle d’Otto
Structure
L’analyse structurelle des drones qui conduit à l’obtention du sous-modèle structurel consistait à déterminer la masse, le centre de gravité et les moments d’inertie de chaque drone, ainsi que leurs variations en fonction du débit de carburant. La structure des drones a été divisée en six parties : les ailes, le fuselage, les moteurs, l’empennage vertical, l’empennage horizontal et le train d’atterrissage [13-15]. Chaque partie a été remplacée par des formes de base, telles que des triangles, des rectangles et des trapèzes, pour faciliter le calcul des centres de gravité et des masses. Les équations de Raymer [16] ont, par la suite, permis de déduire la masse, le centre de gravité et les moments d’inertie de chaque drone.
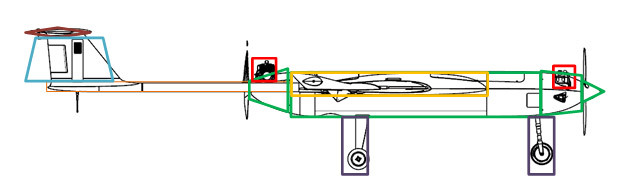
Figure 7 Décomposition de l’UAS-S45 en forme de base
Actionneur
Chaque modèle UAS a par la suite été complété avec le sous-modèle d’un actionneur. Chaque actionneur étant un servomoteur, le modèle d’un moteur à courant continu contrôlé a été utilisé pour la modélisation.
Comparaison des prédictions des sous-modèles aux résultats expérimentaux
Une validation a été effectuée pour chaque sous-modèle. Le sous-modèle aérodynamique obtenu avec notre code et méthodologie Fderivatives a été comparé à l’aide d’une analyse CFD, de la méthode des panneaux (VLM) et de la procédure DATCOM. Les prédictions obtenues par les sous-modèles de propulsion, d’actionnement, et de structure ont été comparées aux données expérimentales. Les résultats ont démontré la précision des sous-modèles élaborés, les erreurs maximales étant de 5 % comparativement aux données expérimentales.
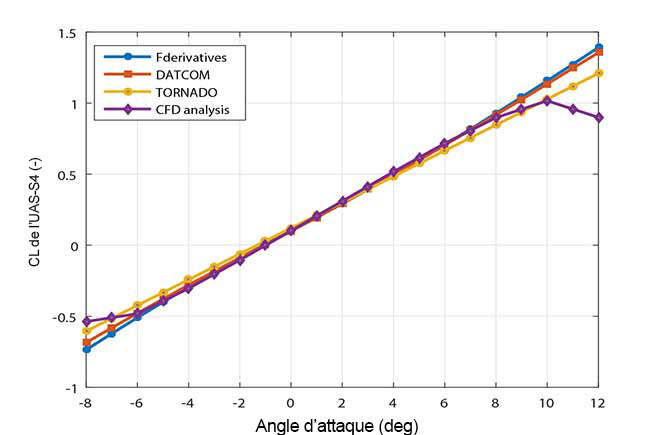
Figure 8a Comparaison des variations du coefficient de portance selon l’angle d’attaque estimées pour la conception du modèle aérodynamique pour l’UAS-S4.
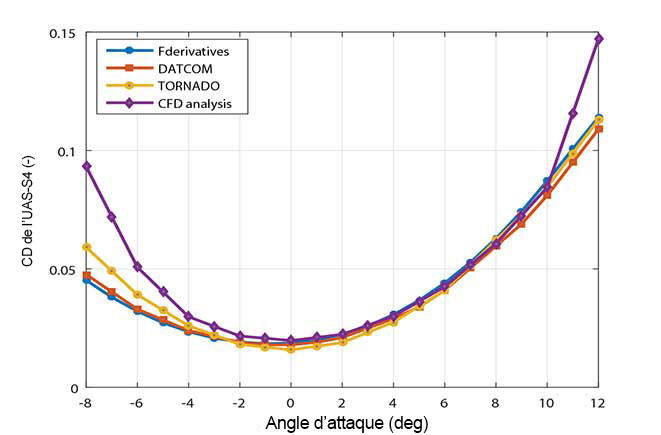
Figure 8b Comparaison des variations du coefficient de traînée selon l’angle d’attaque, estimées pour la conception du modèle aérodynamique pour l’UAS-S4.
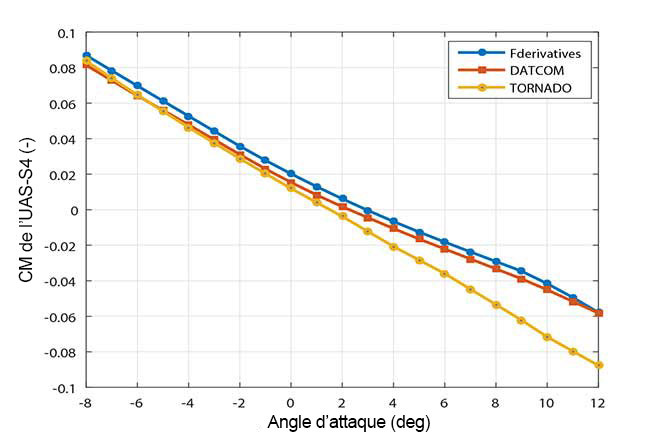
Figure 8c Comparaison des variations du moment de tangage selon l’angle d’attaque, estimées pour la conception du modèle aérodynamique pour l’UAS-S4
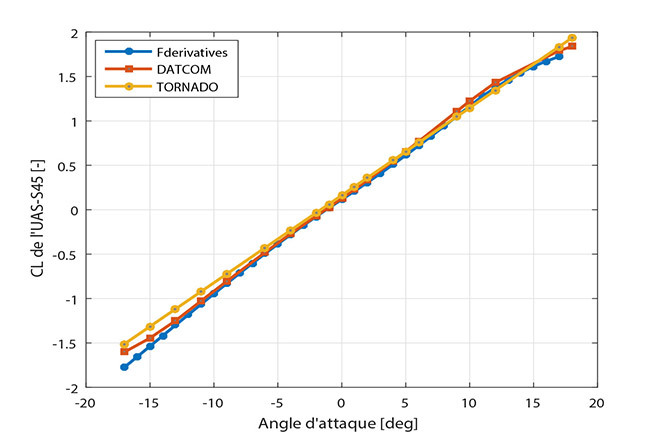
Figure 9a Comparaison des variations du coefficient de portance selon l’angle d’attaque, estimées pour la conception du modèle aérodynamique pour l’UAS-S45
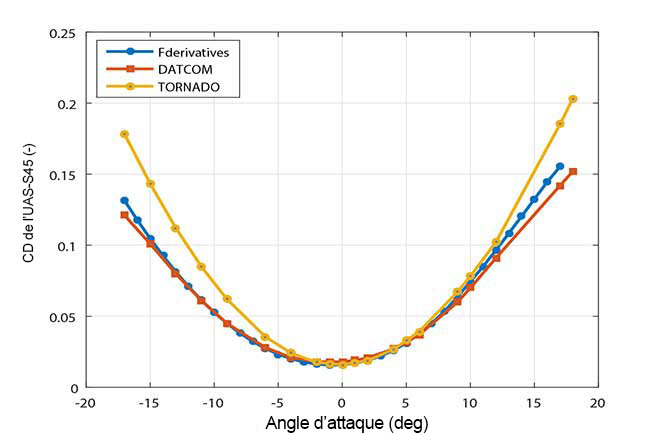
Figure 9b Comparaison des variations du coefficient de traînée selon l’angle d’attaque, estimées pour la conception du modèle aérodynamique pour l’UAS-S45
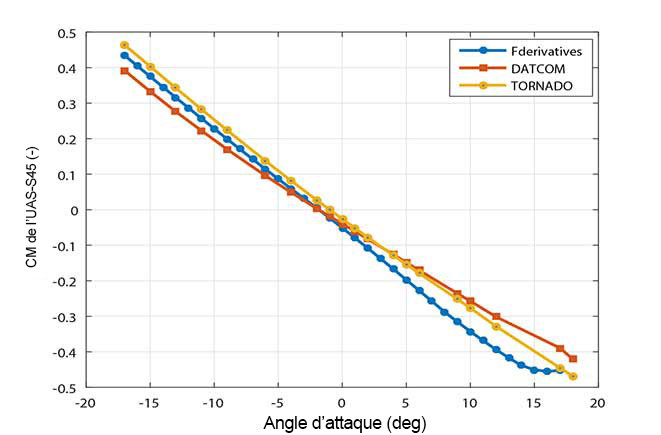
Figure 9c Comparaison des variations du moment de tangage selon l’angle d’attaque, estimées pour la conception du modèle aérodynamique pour l’UAS-S45
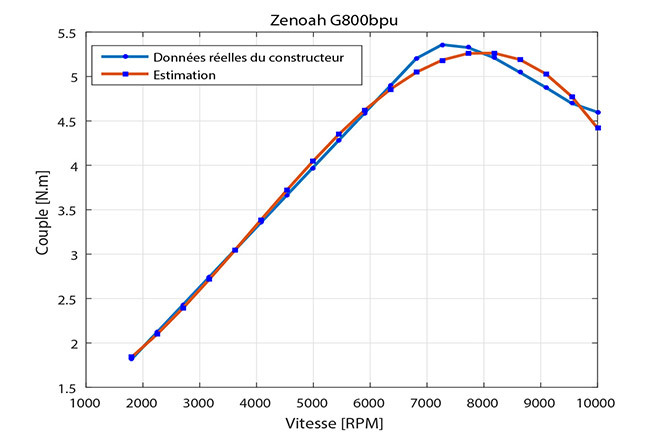
Figure 10a Comparaison entre les données estimées par le sous-modèle de propulsion et les données expérimentales pour l’UAS-S4
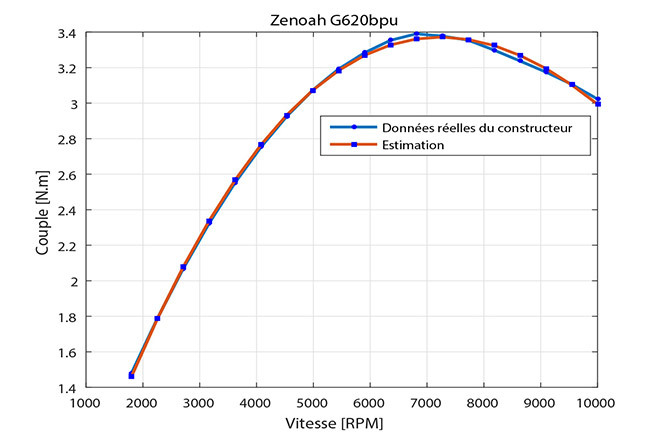
Figure 10b Comparaison entre les données estimées par le sous-modèle de propulsion et les données expérimentales pour le UAS-S45
Conclusion et prochaines étapes de recherche
Le modèle de vol global ainsi obtenu sera utilisé pour la conception d’un simulateur de vol de haute précision. Les résultats obtenus en simulation seront comparés aux données de test en vol expérimentales et permettront de réduire de manière significative le nombre d’essais en vol nécessaire pour la validation des techniques d’amélioration de performances de l’UAS-S4 et de l’UAS-S45 [17, 18]. Le projet de recherche apportera alors une contribution à l’industrie aérospatiale d’un point de vue économique, étant donné qu’il offrira une économie de temps et d’argent considérable en réduisant le nombre d’essais en vol.
Informations supplémentaires
La méthodologie de conception des modèles de vol des UAS-S4 et UAS-S45 et les résultats obtenus lors de ce projet de recherche sont présentés dans l’article de recherche suivant : Kuitche Maxime et Ruxandra Botez, “Modeling Novel Methodologies for Unmanned Aerial System – Applications to the UAS-S4 Ehecatl and the UAS-S45 Bálaam”, Chinese Journal of Aeronautics, Vol. 32(1), January 2019, pp. 58-77, Elsevier Edition.


