
Accélérer la reconnaissance d’images par l’informatique de périphérie

Achetée sur Gettyimages. Droits d’auteur.
Les applications modernes nécessitent des approches complexes comme l’apprentissage machine (AM) et du contenu multimédia. Les appareils à ressources limitées ne sont pas en mesure de traiter des applications critiques en temps réel. Aussi, l’informatique de périphérie (Edge) peut fournir les ressources nécessaires pour répondre à ces exigences élevées. Dans cet article, nous décrivons les expériences qui nous ont amenés à identifier les configurations d’efficacité ou de qualité qui permettront à un robot de recherche et de sauvetage de décharger des tâches en temps réel. Mots-clés : informatique de périphérie, déchargement de tâches, compression d’images, apprentissage machine
Un serveur de périphérie pour accélérer l’inférence
Cet article porte sur un robot de recherche et de sauvetage utilisé dans le contexte de l’Internet industriel des objets (IIdO). Dans ce cas d’utilisation, un robot ou un véhicule aérien sans pilote (drone) recherche des sujets d’intérêt (p. ex., des humains) dans une zone désignée. Le robot saisit successivement des images haute résolution du paysage et exécute une inférence, c’est-à-dire qu’il applique un modèle d’apprentissage machine pour identifier une liste d’objets prédits et leur emplacement, moyennant un certain degré de confiance dans la prédiction.
Lors d’une mission de recherche et de sauvetage, les personnes disparues peuvent se trouver en danger de mort. L’inférence doit donc être aussi rapide et précise que possible. Grâce aux progrès informatiques de l’IIdO, les robots aux ressources limitées peuvent exécuter en temps réel des modèles légers d’AM, à consommation faible de batterie. Toutefois, ces modèles n’ont pas la précision nécessaire pour trouver des sujets qui ne mesurent que quelques pixels.
Les modèles d’AM plus complexes sont plus précis, mais leur exécution par le robot lui-même accroît de façon importante le temps d’inférence et l’utilisation de la batterie. Comme démontré dans les récentes recherches (Spatharakis et al., 2022), le robot peut choisir de décharger ce processus sur un serveur local plus puissant, déployé par l’équipe de recherche et de sauvetage. Dans notre projet, nous utilisons un serveur de périphérie au lieu d’une infrastructure infonuagique afin de réduire la surcharge de transmission. Le serveur de périphérie dispose des ressources nécessaires pour exécuter en temps réel un modèle d’AM plus complexe. Avant le déchargement, le robot encode l’image afin de minimiser le temps de transmission. La figure 1 présente l’organigramme du système.
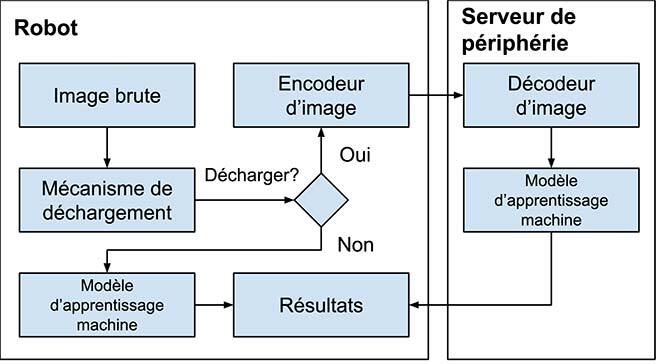
Figure 1. Organigramme du système de recherche et de sauvetage.
L’innovation : analyse comparative pour le traitement d’images en temps réel
Dans notre projet, nous suivons les tendances actuelles en matière de robotique de pointe. Des travaux récents (Chinchali et al., 2021, Cai et al., 2021) sur la reconnaissance d’images en temps réel, le traitement des données et l’apprentissage des robots insistent sur la nécessité d’un mécanisme de déchargement des tâches pour augmenter la précision de certaines applications, tout en réduisant le temps de réponse et en préservant les ressources des appareils IIdO.
L’informatique d’approximation est un concept novateur où on choisit entre différentes configurations d’efficacité ou de qualité pour exécuter une application informatique complexe à l’aide de différentes ressources informatiques (i.e., GPU ou CPU). Cependant, il est nécessaire de décider si on doit décharger ces tâches. Il faut des mécanismes décisionnels sur le déchargement des tâches pour maximiser l’utilisation des ressources tout en maintenant la qualité de service (QoS). En outre, l’informatique de périphérie est un paradigme qui permet de minimiser les surcharges de communication. Selon nous, ce travail est une analyse comparative préliminaire importante qui utilise des logiciels de pointe pour soutenir une structure de ce type.
Méthodologie
Nos expériences nous permettent de présenter les principaux aspects du scénario proposé, à savoir : (i) une analyse comparative de la précision de YOLOv5 en fonction des paramètres d’image utilisés et (ii) une analyse comparative de la performance de compression de JPEG XL en fonction des efforts et des facteurs de qualité utilisés.
Analyse comparative de la précision de YOLOv5
YOLOv5 (You Only Look Once version 5) est un algorithme d’apprentissage machine conçu pour la détection d’objets en temps réel. Dans cette expérience, nous étudions l’effet de la hauteur et du facteur de qualité d’une image sur la précision des prédictions de YOLOv5, afin d’identifier les paramètres qui permettent la transmission la plus rapide et une perte minimale de précision.
Nous avons encodé des images en format JPEG XL avec différents facteurs de qualité. Le facteur de qualité est un nombre réel allant jusqu’à 100 qui contrôle la qualité visuelle de l’image encodée. Un facteur de qualité de 100 produit une image sans perte, tandis qu’un facteur de qualité de 90 produit une image sans perte de qualité visuelle. Un facteur de qualité inférieure réduit le débit binaire de l’image encodée au prix d’une qualité visuelle moindre.
La figure 2 montre les résultats. Les images avec facteur de qualité de 100 donnent généralement les résultats les plus précis. Par contre, comme le montre l’expérience suivante, ces images ont un débit binaire beaucoup plus élevé que les autres facteurs de qualité, ce qui augmente leur temps de transmission. Dans le mécanisme de déchargement, un compromis raisonnable entre le temps de transmission et la précision des prédictions peut consister à encoder avec un facteur de qualité de 90 et à utiliser une résolution plus élevée.
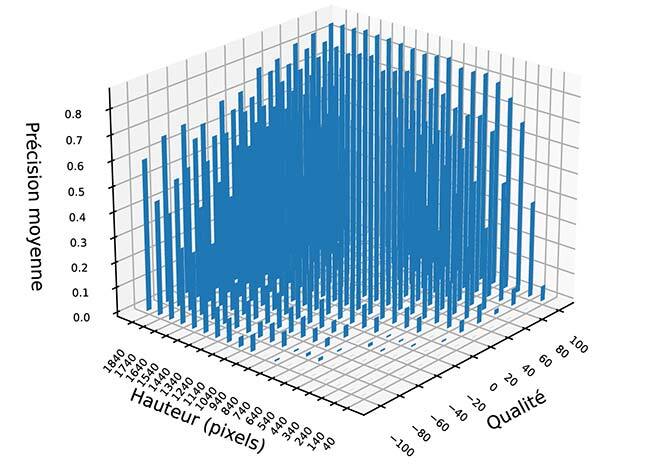
Figure 2. Précision des prédictions de YOLOv5 en fonction de la hauteur et du facteur de qualité des images.
Analyse comparative de la compression de JPEG XL
Le logiciel libjxl est l’implémentation de référence du format d’image JPEG XL. Il offre généralement un meilleur taux de compression, une image plus fidèle et une plus grande vitesse d’encodage/décodage que les autres formats. Dans cette expérience, nous étudions l’influence de l’effort et du facteur de qualité sur le débit binaire et la vitesse d’encodage, afin d’identifier les paramètres qui assurent le temps de transmission le plus rapide et une perte minimale de précision. Nous avons encodé des images avec libjxl avec différents facteurs de qualité et efforts. Nous avons écarté les facteurs de qualité inférieurs à 40, car, comme le montre la figure 2, la précision des prédictions était trop faible. Les efforts sont des préréglages qui activent ou désactivent les outils d’encodage JPEG XL. Les animaux plus lents (ex., kitten) activent plus d’outils pour réduire le débit binaire au prix d’une vitesse d’encodage plus lente.
La figure 3 et le tableau 1 montrent les résultats. Le comportement de JPEG XL n’est pas déterministe. Des images de résolution et de contenu différents donnent des résultats différents. Cependant, l’effort offre généralement des rendements décroissants. Par exemple, « kitten » comparativement à « cheetah » permet une économie moyenne du débit binaire de 9,5 %, mais ralentit l’encodage de 97,5 %.
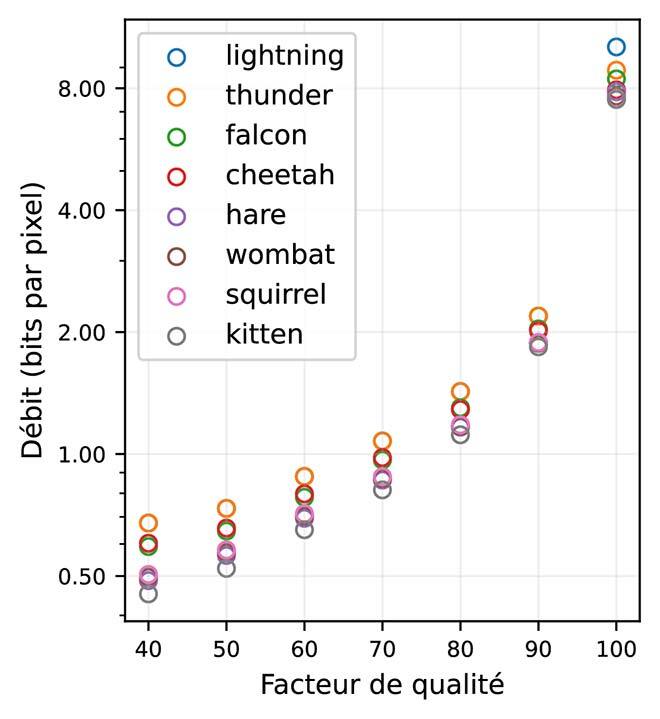
Figure 3. Débit moyen en bits par pixel, en fonction du facteur de qualité pour chaque effort. L’axe des y est à l’échelle logarithmique.
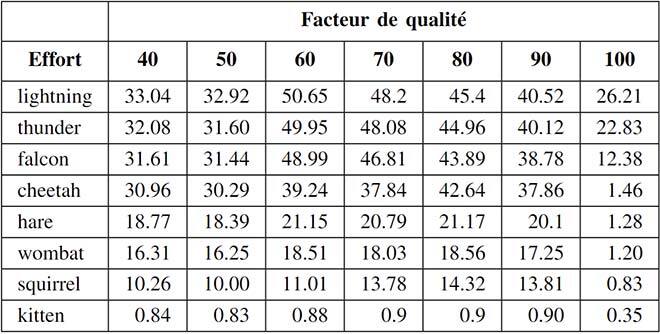
Tableau 1 Vitesse moyenne d’encodage en mégapixels par seconde, en fonction du facteur de qualité de l’effort.
Conclusion
Dans cet article, nous décrivons notre analyse comparative des technologies qui soutiennent le déchargement périphérique dans un cas d’utilisation de recherche et de sauvetage Edge IIdO. Nos résultats nous amènent à identifier les configurations d’efficacité ou de qualité qui permettront au système de fonctionner en temps réel. Dans les travaux ultérieurs, nous construirons le mécanisme de déchargement périphérique.
Complément d’information
- Brochu, D. Spatharakis, D. Dechouniotis, A. Leivadeas and S. Papavassiliou. 2022. “Benchmarking real-time image processing for offloading at the edge”. In IEEE International Mediterranean Conference on Communication and Networking (MeditCom), p. 90-93.


